OpenAI gym tutorial
Deep RL and Controls OpenAI Gym Recitation
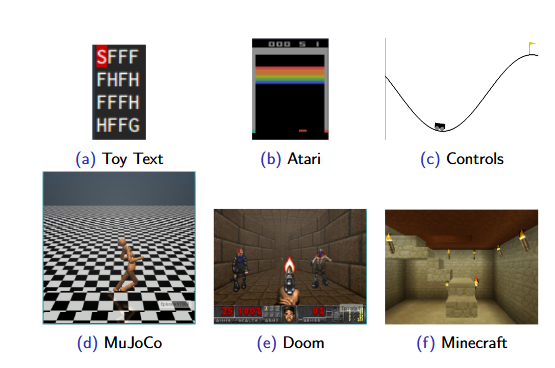
Domain Example OpenAI
VirtualEnv Installation
- It is recommended that you install the gym and any dependencies in a virtualenv
- The following steps will create a virtualenv with the gym installed virtualenv openai-gym-demo
source openai-gym-demo/bin/activate
pip install -U gym[all]
python -c 'import gym; gym.make("FrozenLake-v0")'
Basic RL Step
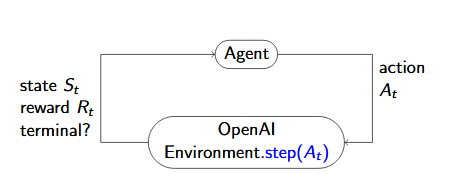
Basic Agent Loop
Basic Agent Loop
import gym
env = gym.make("Taxi-v2")
observation = env.reset()
for _ in range(1000):
env.render()
# your agent here (this takes random actions)
action = env.action_space.sample()
observation, reward, done, info = env.step(action)
if done:
env.render()
break
Create Instance
- Each gym environment has a unique name of the form ([A-Za-z0-9]+-)v([0-9]+)
- To create an environment from the name use the env = gym.make(env_name)
- For example, to create a Taxi environment: env = gym.make(‘Taxi-v2’)
Reset Function
init_state = env.reset()
Step Function
step(action) -> (next_state,reward,is_terminal,debug_info)
Render Function
- Optional method
- Used to display the state of your environment
- Useful for debugging and qualitatively comparing different agent policies
Datatypes
- Reward: float
- Terminal: bool
- Action: Depends on environment
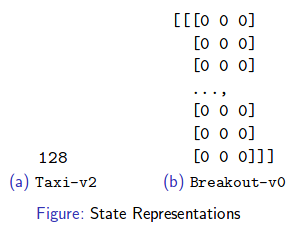
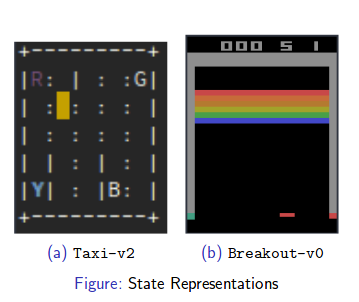
- State: Depends on environment
Environment Space Attributes
-
Most environments have two special attributes: action_space observation_space
- These contain instances of gym.spaces classes
- Makes it easy to find out what are valid states and actions I
- There is a convenient sample method to generate uniform random samples in the space.
gym.spaces
-
Action spaces and State spaces are defined by instances of classes of the gym.spaces modules
- Included types are:
gym.spaces.Discrete gym.spaces.MultiDiscrete gym.spaces.Box gym.spaces.Tuple - All instances have a sample method which will sample random instances within the space
gym.spaces.Discrete
- The homework environments will use this type of space Specifies a space containing n discrete points
- Each point is mapped to an integer from [0 ,n−1]
- Discrete(10) A space containing 10 items mapped to integers in [0,9] sample will return integers such as 0, 3, and 9.
gym.spaces.MultiDiscrete
- You will use this to implement an environment in the homework
- Species a space containing k dimensions each with a separate number of discrete points.
- Each point in the space is represented by a vector of integers of length k
- MultiDiscrete([(1, 3), (0, 5)]) A space with k= 2 dimensions First dimension has 4 points mapped to integers in [1,3] Second dimension has 6 points mapped to integers in [0,5] sample will return a vector such as [2,5] and [1,3]
gym.spaces.Box
- Used for multidimensional continuous spaces with bounds
- You will see environments with these types of state and action spaces in future homeworks
- Box(np.array((-1.0, -2.0)), np.array((1.0, 2.0))) A 2D continous state spaceI First dimension has values in range [−1.0,1.0) Second dimension has values in range [−2.0,2.0) sample will return a vector such as [−.55,2.] and [.768,−1.55]
Creating an Environment
gym.Env Class
- All environments should inherit from gym.Env
- At a minimum you must override a handful of methods:
- _step
- _reset
- At a minimum you must provide the following attributes action_space observation_space
Subclass Methods
- _step is the same api as the step function used in the example
- _reset is the same api as the reset function in the example
-
You may also provide the following methods for additionalfunctionality:
_render
_close
_configure
_seed
Attributes
- observation_space represents the state space
- action_space represents the action space
- Both are instances of gym.spaces classes
- You can also provide a reward_range , but this defaults to (−∞,∞)
Registration
- How do you get your environment to work with gym.make()? You must register it
Registration Example
from gym.envs.registration import register
register(
id='Deterministic-4x4-FrozenLake-v0',
entry_point='gym.envs.toy_text.frozen_lake:FrozenLakeEnv',
kwargs={'map_name': '4x4',
'is_slippery': False})
- id: the environment name used with gym.make
- entry_point: module path and class name of environment
- kwargs: dictionary of keyword arguments to environment constructor
Discrete Environment Class
- A subclass of the gym.Env which provides the
followingattributes- nS: number of states
- nA: number of actions
- P: model of environment
- isd: initial state distribution
Model
- P is a dictionary of dictionary of lists P[s][a] == [(prob, next_state, reward, terminal), …]
- isd is a list or array of length nS isd == [0., 0., 1., 0.]
Example
FrozenLake-v0 Example
demos/frozen_lake_demo.py
Monitoring and Scoring
OpenAI Gym Scoreboard
- The gym also includes an online scoreboard
-
Gym provides an API to automatically record: learning curves of cumulative reward vs episode number Videos of the agent executing its policy
- You can see other people’s solutions and compete for the best scoreboard
Monitor Wrapper
import gym
from gym import wrappers
env = gym.make('CartPole-v0')
env = wrappers.Monitor(env, '/tmp/cartpole-experiment-1')
for i_episode in range(20):
observation = env.reset()
for t in range(100):
env.render()
print(observation)
action = env.action_space.sample()
observation, reward, done, info = env.step(action)
if done:
print("Episode finished after {} timesteps".format(t+1))
break
env.close()
gym.upload('/tmp/cartpole-experiment-1', api_key='blah')
Scoreboard Demo
demos/monitor_demo.py