def closed_loop_control(cx, cy, cyaw, ck, speed_value, goal,start):
T = 500.0 # max simulation time
# goal_dis = 0.3
goal_dis = 2.0
stop_speed = 0.05
state = State(x=start[0], y=start[1], yaw=start[2], v=start[3])
# state = State(x=120, y=60.0, yaw=1.57, v=0.0)
time = 0.0
x = [state.x]
y = [state.y]
yaw = [state.yaw]
v = [state.v]
t = [0.0]
target_ind = calc_nearest_index(state, cx, cy, cyaw)
global gmapindex
global gmindist
global gvehicleyaw
global gcyaw
global gdiffyaw
global gcurvature
global gspeed
global gangleout
global gdelta
gmapindex =[]
gmindist =[]
gvehicleyaw =[]
gcyaw =[]
gdiffyaw =[]
gcurvature =[]
gspeed =[]
gangleout =[]
gdelta =[]
global gspeedprofile
global gstatespeed
global gpidout
gspeedprofile = []
gstatespeed = []
gpidout = []
global gstatex
global gstatey
global gstateyaw
global gstatev
gstatex =[]
gstatey =[]
gstateyaw =[]
gstatev =[]
global gformA
global gformB
global gformC
gformA = []
gformB = []
gformC = []
while T >= time:
di, target_ind = longitudinal_lateral_control(
state, cx, cy, cyaw, ck, target_ind)
ai = SpeedControl(speed_value[target_ind], state.v)
state = positionupdate(state, ai, di)
gstatex.append(state.x)
gstatey.append(state.y)
gstateyaw.append(state.yaw)
gstatev.append(state.v)
if abs(state.v) <= stop_speed:
target_ind += 1
time = time + dt
# check goal
dx = state.x - goal[0]
dy = state.y - goal[1]
if math.sqrt(dx ** 2 + dy ** 2) <= goal_dis:
print("Finished")
break
x.append(state.x)
y.append(state.y)
yaw.append(state.yaw)
v.append(state.v)
t.append(time)
# print ('target_ind',target_ind)
if target_ind % 10 == 0 and animation:
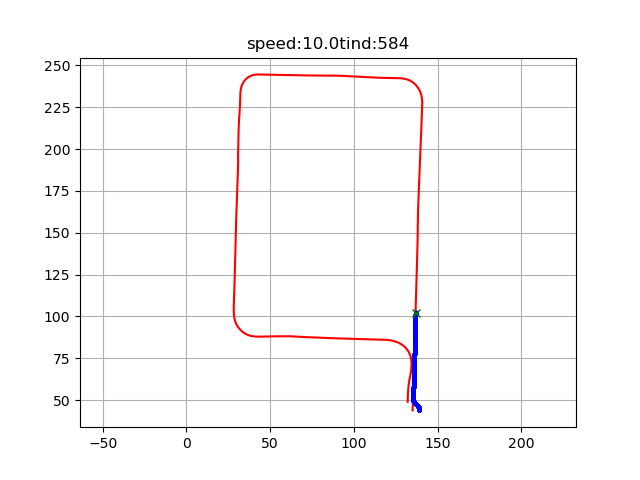
plt.cla()
plt.plot(cx, cy, "-r", label="course")
plt.plot(x, y, "ob", label="trajectory",ms=2)
plt.plot(cx[target_ind], cy[target_ind], "xg", label="target")
plt.axis("equal")
plt.grid(True)
tempspeed = state.v*3.6
plt.title("speed:" + str(round(tempspeed, 2)) +
"tind:" + str(target_ind))
plt.savefig('demomap_png/'+str(target_ind)+'.png')
plt.pause(0.0001)
csvparam = 'result.csv'
if os.path.exists(csvparam):
os.remove(csvparam)
print ('len(gspeedprofile)',len(gspeedprofile),'len(gmapindex)',len(gmapindex))
totaldf = pd.DataFrame({'mapidx':gmapindex,'mindist':gmindist,'vehicleyaw':gvehicleyaw\
,'cyaw':gcyaw,'diffyaw':gdiffyaw,'curvature':gcurvature,'vehiclespeed':gspeed\
,'angleout':gangleout,'delta':gdelta,'speedprofile':gspeedprofile,'PIDSpeedIn':gstatespeed\
,'pidout':gpidout,'statex':gstatex,'statey':gstatey,'stateyaw':gstateyaw,'statev':gstatev\
,'gformA':gformA,'gformB':gformB,'gformC':gformC})
# totaldf['radius'] = 1.0/totaldf['curvature']
totaldf['deltadegree'] = totaldf['delta']*57.3
totaldf.to_csv('result.csv')
return t, x, y, yaw, v
def demo_main():
global mapx
global mapy
global maptheta
LoadData()
print("demo_main !!")
# ax = [0.0, 6.0, 12.5, 5.0, 7.5, 3.0, -1.0]
# ay = [0.0, 0.0, 5.0, 6.5, 3.0, 5.0, -2.0]
# ax = [0.0, 6.0, 6.0, 12.0]
# ay = [0.0, 0.0, 6.0, 6.0]
ax = mapx#[]
ay = mapy#[]
goal = [ax[-1], ay[-1]]
# start = [ax[0]+4.0,ay[0]+0.1,1.57,0]
start = [ax[0]+4.0,ay[0]+0.1,10/57.3,0]
cx, cy, cyaw, ck, s = gen_spline(ax, ay, ds=0.1)
# radius = 1/ck
target_speed = 10.0 / 3.6 #kph -> mps
print ('len(ax),len(cx)',len(ax),len(cx))
sp = calc_speed_value(cx, cy, cyaw, target_speed)
t, x, y, yaw, v = closed_loop_control(cx, cy, cyaw, ck, sp, goal,start)
cnt = 0
refvehiclecurvature = []
refvehicleradius = []
for cnt in range(len(x)):
if cnt + 2 >= len(x):
refvehiclecurvature.append(refvehiclecurvature[-1])
refvehicleradius.append(refvehicleradius[-1])
else:
curvatureval = curvature([[x[cnt],y[cnt]],[x[cnt+1],y[cnt+1]],[x[cnt+2],y[cnt+2]]])
if curvatureval != 0.0:
refvehiclecurvature.append(1/curvatureval)
else:
refvehiclecurvature.append(0.01)
refvehicleradius.append(curvatureval)
cnt += 1
print ('len(refvehicleradius)',len(refvehicleradius),'len(x)',len(x))
csvparam = 'vehicletrace.csv'
if os.path.exists(csvparam):
os.remove(csvparam)
spliedf = pd.DataFrame({'x':x,'y':y,'yaw':yaw,'refvehiclecurvature':refvehiclecurvature\
,'refvehicleradius':refvehicleradius})
spliedf.to_csv('vehicletrace.csv')
flg, _ = plt.subplots(1)
print(len(ax), len(ay))
plt.plot(ax, ay, "xb", label="input",ms=3.0)
plt.plot(cx, cy, "-r", label="spline")
plt.plot(x, y, "-g", label="tracking")
plt.grid(True)
plt.axis("equal")
plt.xlabel("x[m]")
plt.ylabel("y[m]")
plt.legend()
global filterdelta
flg, ax = plt.subplots(1)
plt.plot(gdelta, "-r", label="delta")
plt.plot(filterdelta, "-b", label="filterdelta")
plt.grid(True)
plt.legend()
plt.ylabel("delta degree")
flg, ax = plt.subplots(1)
plt.plot(yaw, "-r", label="vehicle state yaw")
plt.grid(True)
plt.legend()
plt.ylabel("state yaw")
plt.show()