ROS Research Topic
An Introduction to Robot Operating System (ROS)
An Introduction to Robot Operating System (ROS)

ROS 기반 다중 객체 비전 인식 (pcl)
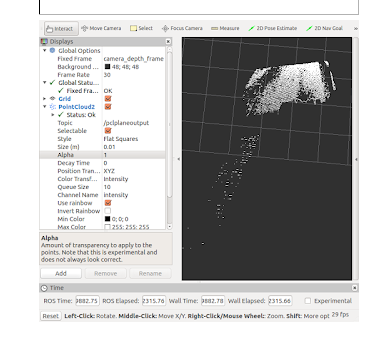
Extracting indices from a PointCloud

Extracting indices from a PointCloud
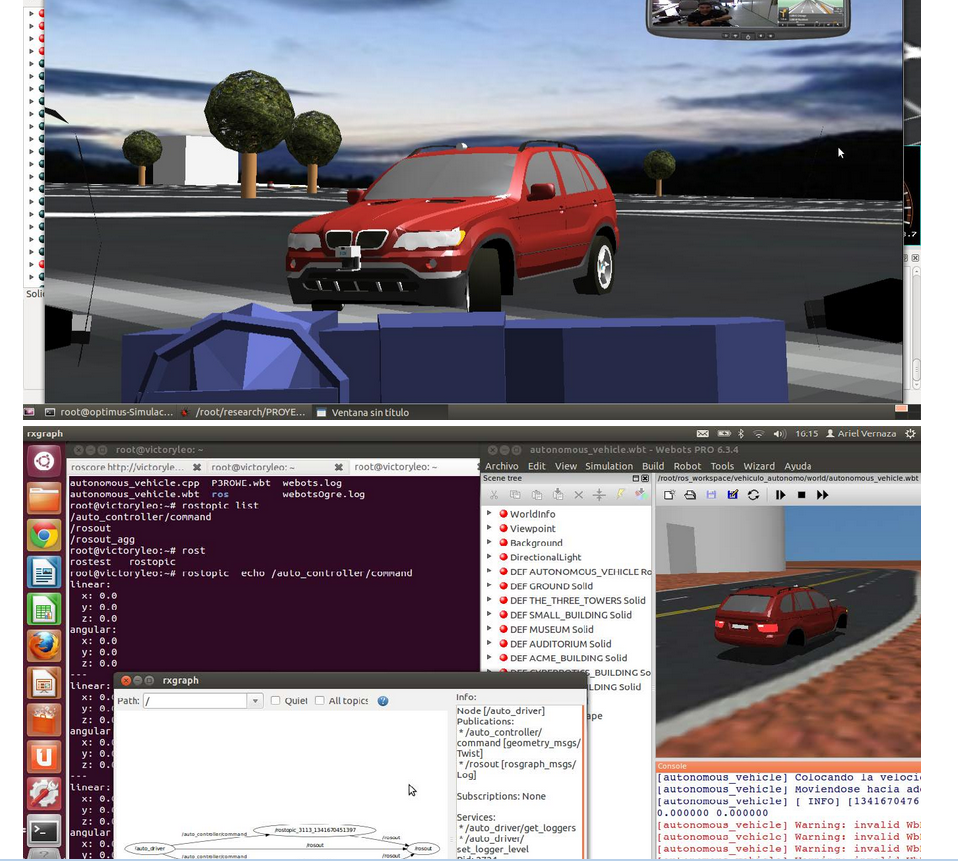
ROS Controller for autonomous vehicle, using opencv for the neural network input. Using Kinect and Interface controller
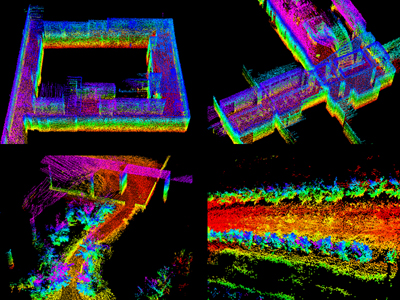
How to display bag file in rviz
$ rosrun velodyne_driver velodyne_node _mol:=VLP16 _pcap:=/home/soowon/Documents/County_Fair.pcap _read_once:=true
On new terminal, to record pcap data into bag file:
$ rosrun rosbag record -O Countyfair.bag /velodyne_packets
ON new terminal, I used rosbag to play bag file that I just made:
$ rosbag play Countyfair.bag
Another new terminal, to open rviz:
$ rosrun rviz rviz
ROS의 RViz로 세계적인 수술용 로봇 daVinci 다빈치를 만나보자
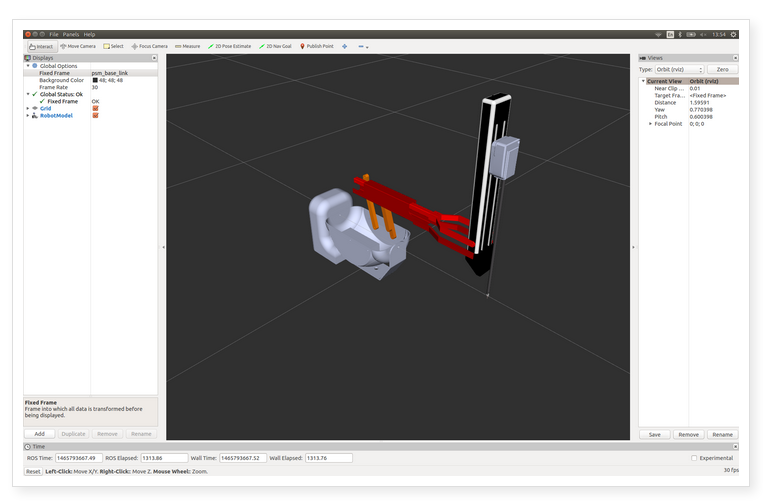
ROS의 RViz로 세계적인 수술용 로봇 daVinci 다빈치를 만나보자
ROS기반 비전 기반 평면 객체 인식
TK1 기반 ROS, 센서, 무선 및 배터리 설치
ROS Tutorial 1: Use ROS to get image with an USB camera
ROS Tutorial 1: Use ROS to get image with an USB camera
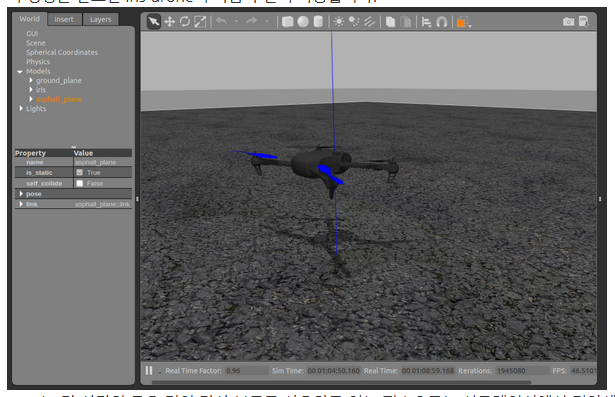
Pixhawk와 ROS를 이용한 자율주행
Laser Odometry and Mapping (Velodyne version)
Laser Odometry and Mapping (Velodyne version)
rosbridge-csharp-connection
How to Calibrate a Monocular Camera
How to Calibrate a Monocular Camera
Writing a ROS Python Makefile
How to remove system dependency packages for a ROS package?
sudo apt-get purge ros-*
sudo apt-get purge python-ros*
sudo apt-get autoremove
How to remove system dependency packages for a ROS package?
How to remove ros-desktop from Ubuntu 16.04 (Xenial Xerus)
How to remove ros-desktop from Ubuntu 16.04 (Xenial Xerus)
Installing OpenCV in Ubuntu for Python 3
Installing OpenCV in Ubuntu for Python 3
TIAGo ROS Simulation Tutorial 2 – Autonomous robot navigation
TIAGo ROS Simulation Tutorial 2 – Autonomous robot navigation
Gazebo 8 installation with ROS integration
Gazebo 8 installation with ROS integration
UnInstalling ROS completely from system in Ubuntu
UnInstalling ROS completely from system in Ubuntu
Open source Structure-from-Motion and Multi-View Stereo tools with C++
Open source Structure-from-Motion and Multi-View Stereo tools with C++