ROS basic and turtlebot example, Ubuntu command error
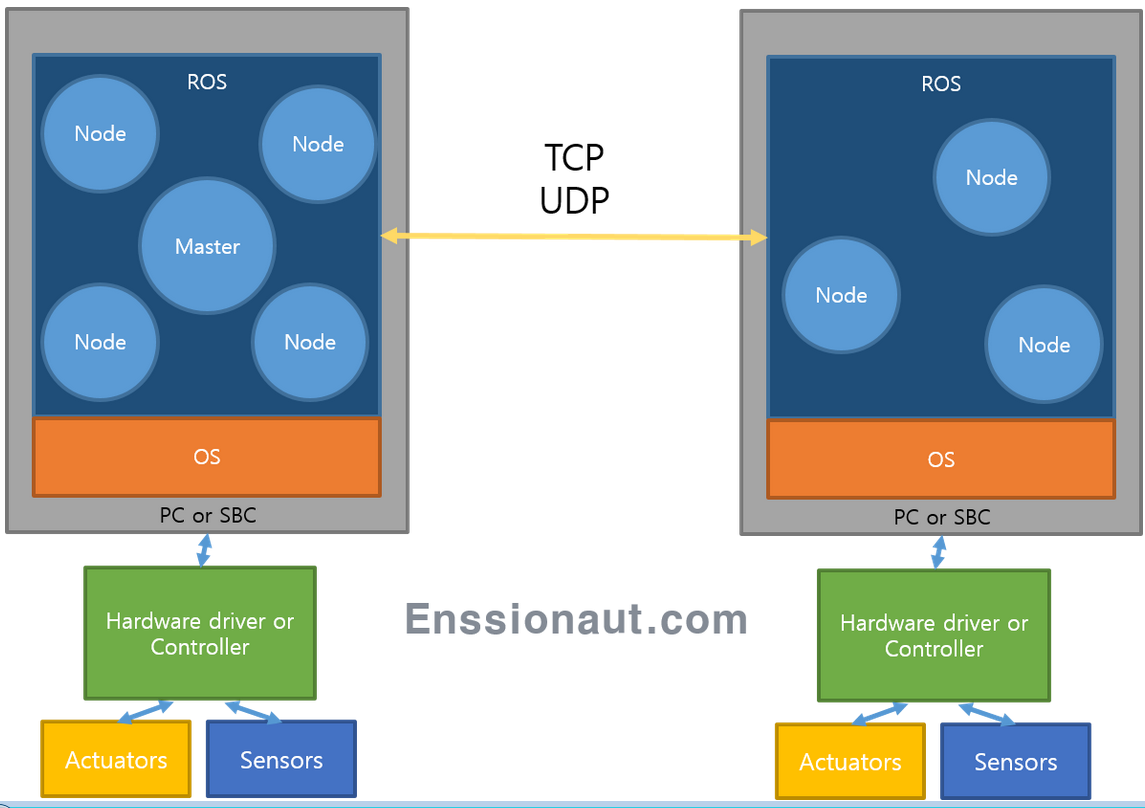
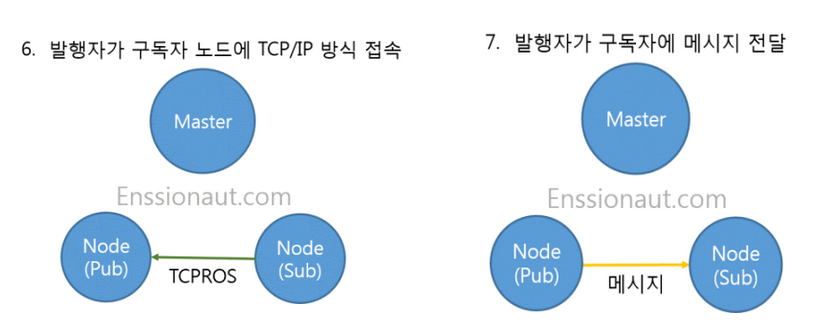
ROS Architecture
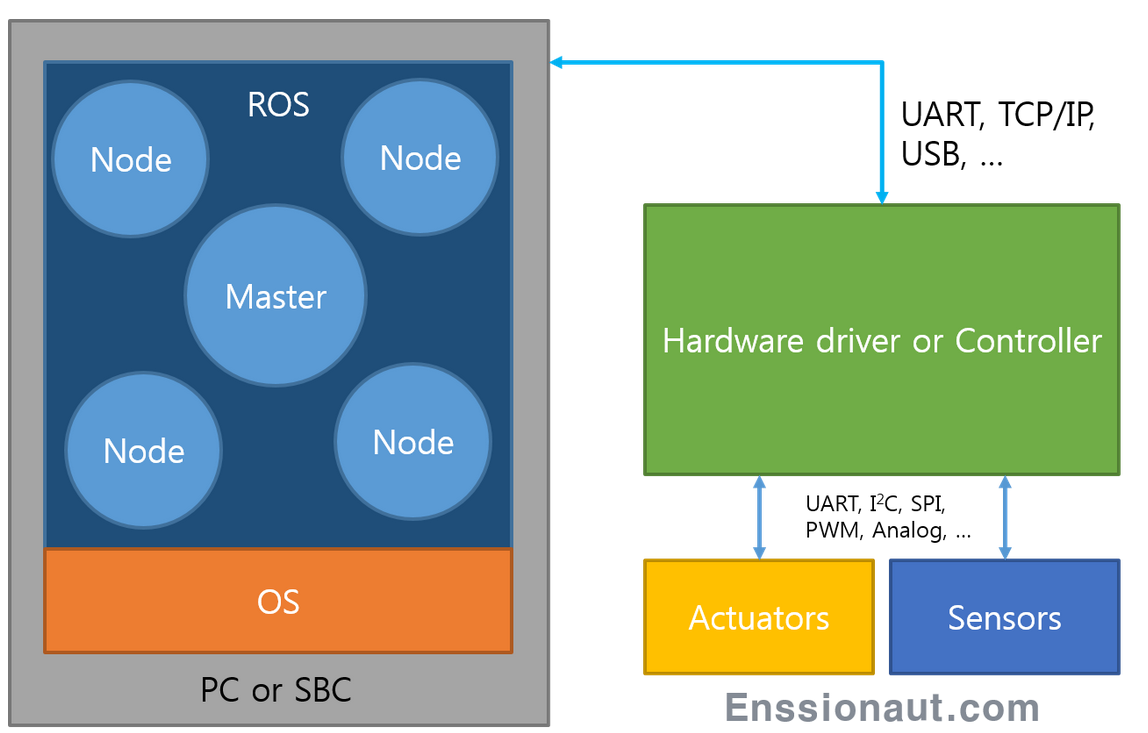
- ROS works on SBC(single board computer) like Rasberry Pi,Intel Edison, BeagleBone
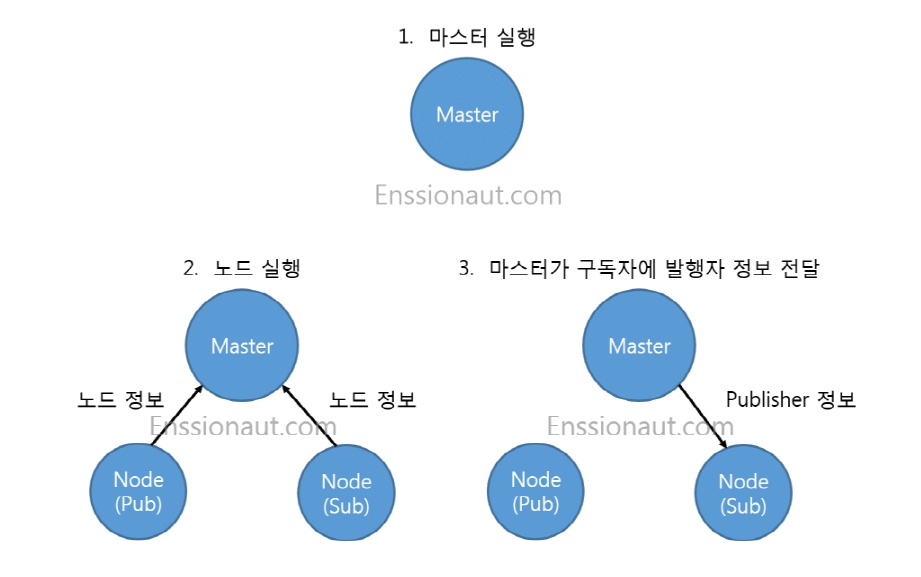
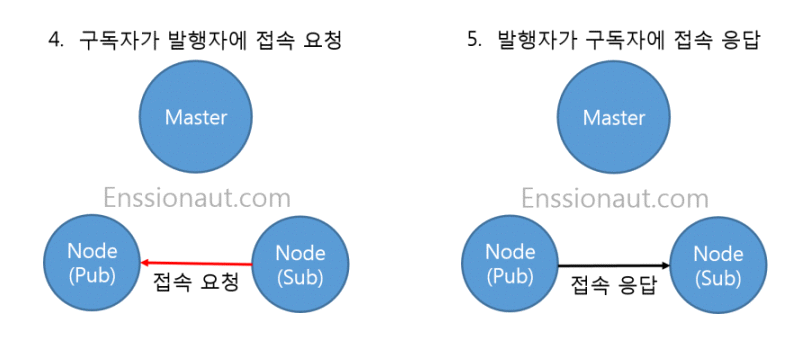
- ROS nodes send and receives msgs which includes topic
- ROS nodes are publisher or subscriber
- ROS master has each nodes information and some kind of server
ROS Install
- setting sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' - setting key
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116 - package update
sudo apt-get update - install ROS
sudo apt-get install ros-indigo-desktop-fullsudo rosdep init rosdep update - catkin: ROS build system
ROS setting working environment
ROS bash shell run
source /opt/ros/indigo/setup.bash
create working directory and init
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
build
cd ~/catkin_ws/
$ catkin_make
- check build, devel, src in the catkin_ws folder after building
source ~/catkin_ws/devel/setup.bash # catkin command bash shell
parameter setting in bashrc
gedit ~/.bashrc
source /opt/ros/indigo/setup.bash
source ~/catkin_ws/devel/setup.bash
export ROS_MASTER_URI=http://XXX.XXX.XXX.XXX:11311 -> master 주소를 설정합니다. XXX.XXX.XXX.XXX에 ip를 입력합니다.
export ROS_HOSTNAME=XXX.XXX.XXX.XXX -> host ip를 입력합니다. Master와 host robot이 다른 경우엔 각각의 ip를, 같은 경우엔 master와 같은 ip를 입력합니다.
alias cw='cd ~/catkin_ws' -> cw 명령어는 catkin workspace 디렉토리로 이동합니다.
alias cs='cd ~/catkin_ws/src'-> cs 명령어는 catkin workspace의 source 디렉토리로 이동합니다.
alias cm='cd ~/catkin_ws && catkin_make' -> cm 명령어는 catkin workspace로 이동한 뒤 ROS 패키지를 build합니다.
Example
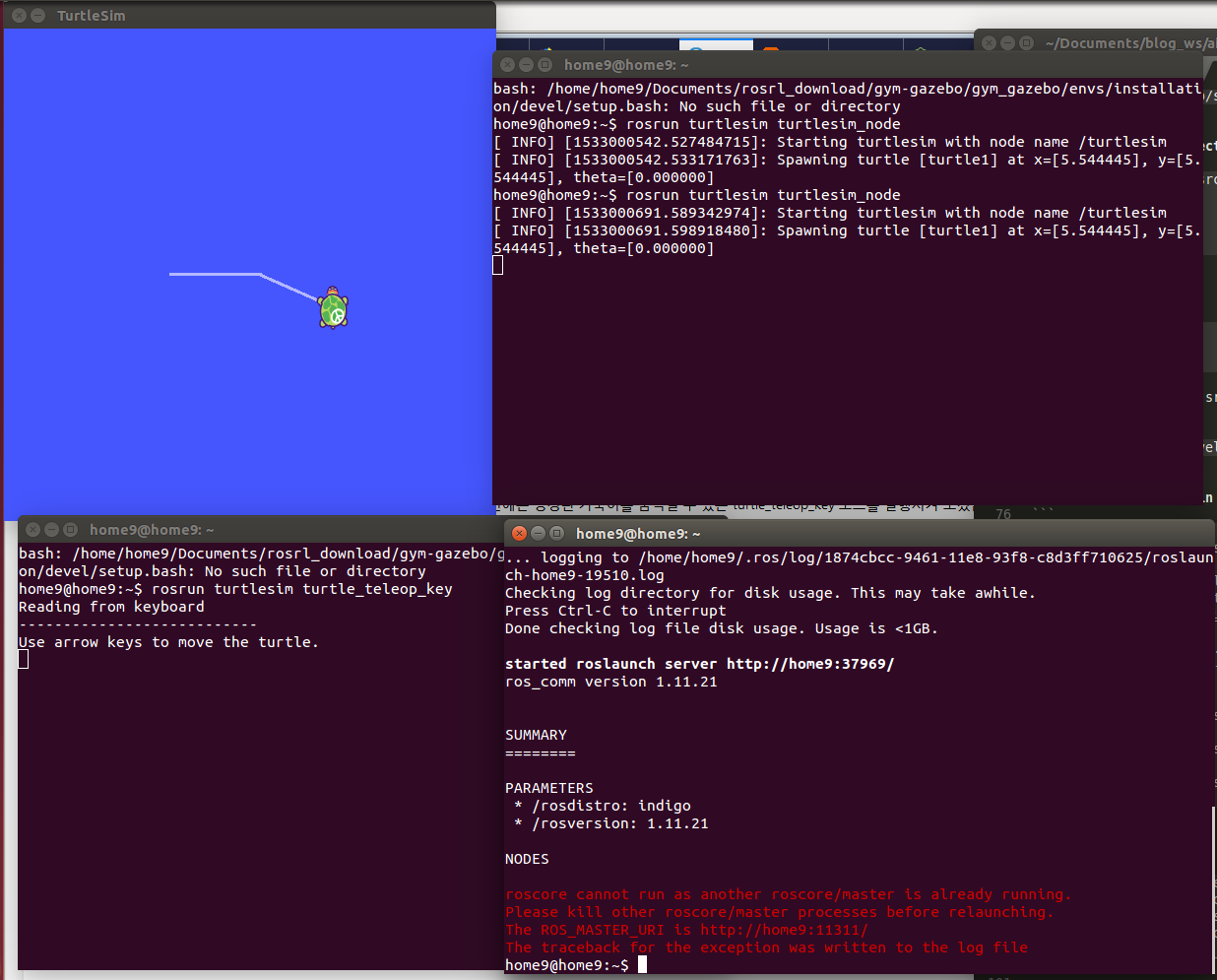
roscore -> run ros master
#start new command window
rosrun turtlesim turtlesim_node -> turtlesim package의 turtlesim_node 노드 실행
#start new command window
rosrun turtlesim turtle_teleop_key -> turtlesim package의 turtle_teleop_key 노드 실행
#start new command window
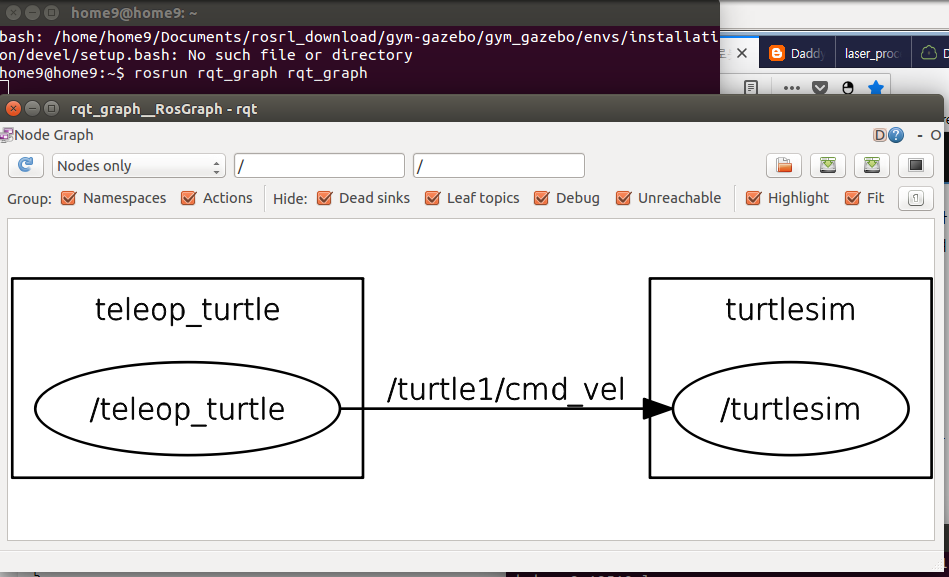
rosrun rqt_graph rqt_graph -> show nodes and messages relationship
ROS 설치하기 (몹시 초보자용)
- ROS install command
- create package with catking ws
ROS를 사용할 때 자주 사용할 기초 명령 및 기능 구경하기
ROS를 사용할 때 자주 사용할 기초 명령 및 기능 구경하기
roscore
rosnode list
rosnode info /rosout
rosrun turtlesim turtlesim_node
rosrun turtlesim turtlesim_node __name:=my_turtle
rosnode ping my_turtle
rosrun turtlesim turtle_teleop_key
rosrun rqt_graph rqt_graph
rostopic echo /turtle1/cmd_vel
rostopic list -v
rosmsg show geometry_msgs/Twist
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
rosrun rqt_plot rqt_plot
Reference sites
ROS(Robot Operating System) 개념과 활용 - 2. ROS의 동작 구조와 적용 사례
After install ROS Kinetic, cannot import OpenCV
Python 3.5.2 (default, Nov 17 2016, 17:05:23)
[GCC 5.4.0 20160609] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
ImportError: /opt/ros/kinetic/lib/python2.7/dist-packages/cv2.so: undefined symbol: PyCObject_Type
After install ROS Kinetic, cannot import OpenCV
It looks like this problem is caused by ROS adding /opt/ros/kinetic/lib/python2.7/dist-packages to the python path. This actually happens when you activate ROS with the command source /opt/ros/kinetic/setup.bash. This line is often added at the end of your bashrc file, in /home/username/.bashrc.
A workaround is to remove this line from the bashrc file. This way the python3 opencv packages will be correctly used, and you can still run source /opt/ros/kinetic/setup.bash to use ROS. However, this does mean you cannot use ROS and python3 from the same environment.
Hopefully someone can come up with a better answer, but this should work until then.
Change folder permissions and ownership
sudo chown -R username:group directory