Monocular Reconstruction of Vehicles: Combining SLAM with Shape Priors
Monocular Reconstruction of Vehicles: Combining SLAM with Shape Priors
-
Monocular Reconstruction of Vehicles: Combining SLAM with Shape Priors
-
-
Monocular Reconstruction of Vehicles: Combining SLAM with Shape Priors Paper
Abstract
- Current approaches leverage two kinds of information to deal with the
vehicle detection and tracking problem- (1) 3D representations (eg. wireframe models or voxel based or CAD models) for diverse vehicle skeletal structures learnt from data,and
- (2) classifiers trained to detect vehicles or vehicle parts in single images
built on top of a basic feature extraction step
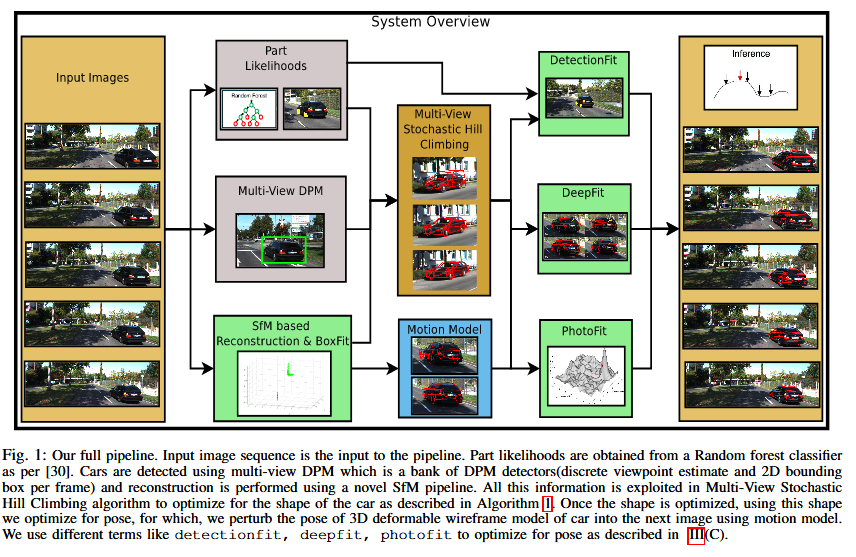
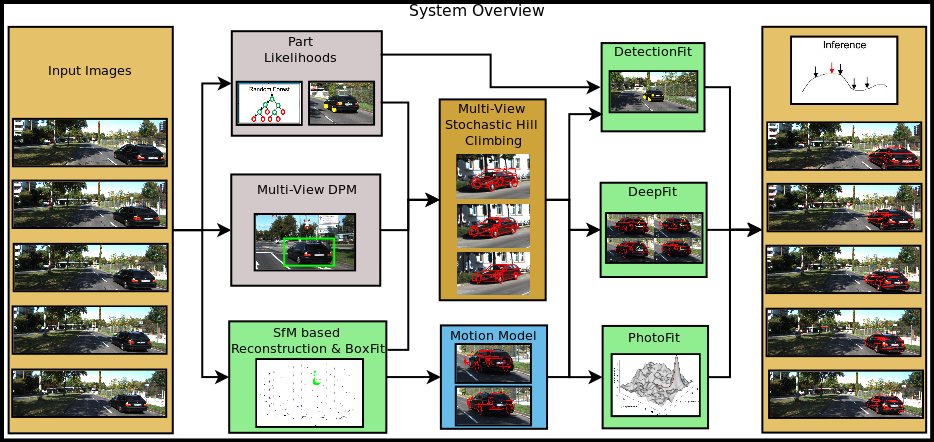
- First, we extend detection to a multiple view setting
- Secondly, we can also leverage 3D information from the scene generated using a unique structure from motion algorithm.
Introduction
- In the present paper, we tightly integrate these deformable 3D object models with state-of-the-art multibody SfM methods,
-
Approximating the visible surfaces of a vehicle by planar segments, supported
by discriminative part detectors allows us to obtain more stable and
accurate 3D reconstruction of moving objects as compared to state-of-the-art SLAM pipelines - Summarily, we list the contributions of the present paper in the following
- We propose a novel piece-wise planar approximation to vehicle surfaces and use it for robust camera trajectory estimation. The object presents itself as a plane to the moving camera. By segmenting the car into its constituent planes by RANSAC with Homography as the model we obtain superior reconstruction of the moving object
- We extend the single-view deformable wireframe model fitting to
multiple views, which stabilizes the estimation of object location and shape
- We experimentally demonstrate improvements in 3D shape estimation and localization on several sequences in KITTI dataset [13] resulting from the the tight integration between SfM cues and object shape modeling