Simple Reinforcement Learning with Tensorflow Part 7: Action-Selection Strategies for Exploration
Introduction
- It will go over a few of the commonly used approaches to exploration which focus on action-selection and show their strengths and weakness
Why Explore?
- In order for an angent to learn how to deal optimally with all possible states,it must be exposed to as many as those states as possible
- Unlike supervised learning, the agent in RL has access to the environment through its own actions
- An Agent needs the right experiences to learn a good policy, but it also needs a good policy to obtain those experience
- exploration and exploitation tradeoff
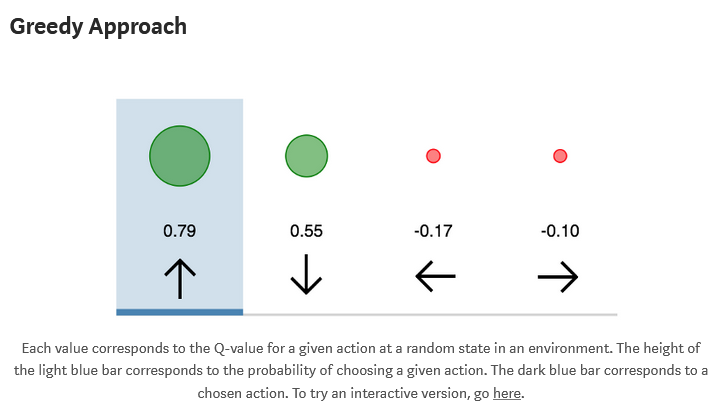
Greedy Approach
Explanation
- All RL seeks to maximize reward over time
- A greedy method
- Taking the action which the agent estimates to be the best at the current moment is exploitation
- This approach cab be thought of as providing little to no exploratory potential
Shortcomings
- The problem is it almost arrives at a suboptimal solution
- Imagine a simple two-armed bandit problem
- If we suppose one arm gives a reward of 1 and the other arm gives a reward of 2, then if the agent’s parameters are such that it chooses the former arm first, then regardless of how complex a neural network we utilize, under a greedy approach it will never learn that the latter action is more optimal
Implementation
#Use this for action selection.
#Q_out referrs to activation from final layer of Q-Network.
Q_values = sess.run(Q_out, feed_dict={inputs:[state]})
action = np.argmax(Q_values)
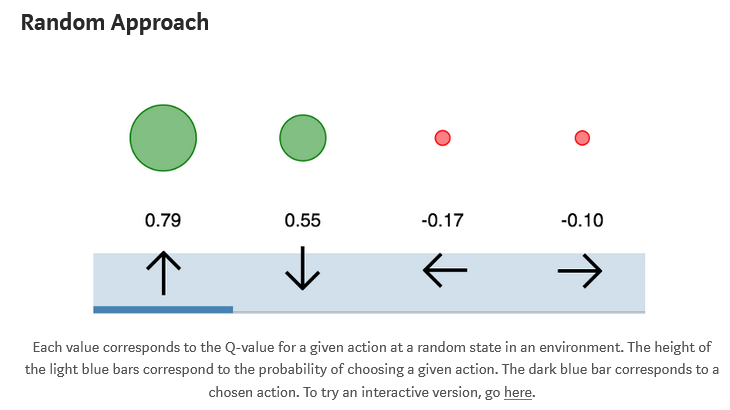
Random Approach
Explanation
- It is to simply always take a random action
Shortcomings
- It can be useful as an initial means of sampling from the state space in order to fill an experience buffer when using DQN
Implementation
#Assuming we are using OpenAI gym environment.
action = env.action_space.sample()
#Otherwise:
#total_actions = ??
action = np.random.randint(0,total_actions)
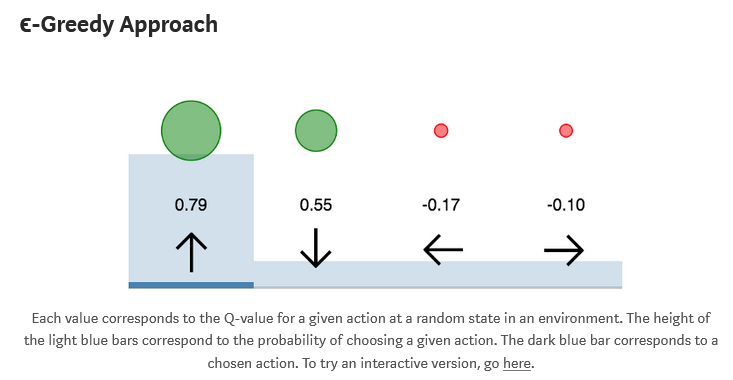
e-greedy Approach
Explanation
- A simple combination of the greedy and random approaches yields one of the most used exploration strategies
- The agent chooses what it believes to be the optimal action most of the time,but occasionally acts randomly
- The epsion parameter determines the probability of taking a random action
- The most defacto technique in RL
Adjusting during training
- At the start of the training process the e value is initialized to a large probability, to encourage exploration
- The e value is then annealed down to the small constant (0.1), as the agent is assumed to learn most of what it needs the environment
Shortcomings
- This method is far from the optimal,it takes into account only whether actions are most rewarding or not
Implementation
e = 0.1
if np.random.rand(1) < e:
action = env.action_space.sample()
else:
Q_dist = sess.run(Q_out,feed_dict={inputs:[state]})
action = np.argmax(Q_dist)
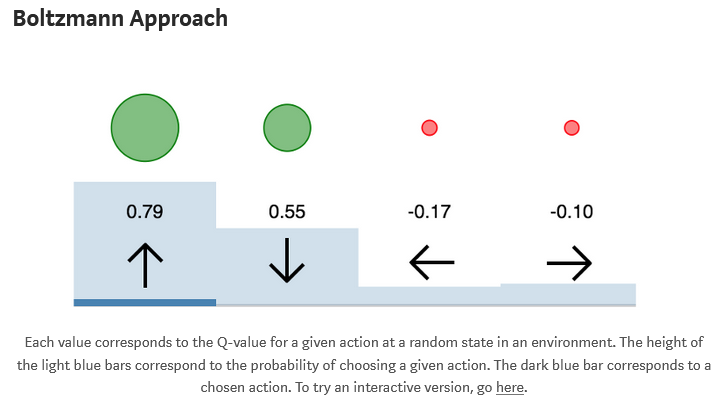
Boltzmann Approach
Explanation
- It would ideally like to exploit all the information present in the estimated Q values
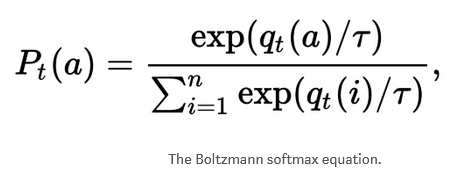
- Instead of always taking the optimal action or taking random action, this approach involves choosing an action with weighted probabilities
- To accomplish this we use a softmax over the networks estimates to be optimal is to be choosen
- The biggest advantage over e-greedy is that value of the other actions can also be taken into consideration
- If there are 4 actions available, in e-greedy the 3 actions estimated to be non-optimal are all considered equally, but in Boltzmann exploration they are weighted by their relative value
- This way the agent can ignore actions which it estimates to be largely sub-optimal and give more attention to potentially promising
Adjusting during training
- we utilize an additional temerature parameter which is annealed over time
- This parameter
 controls the spread of the softmax distribution
controls the spread of the softmax distribution - such that all actions are considered equally at the start of training, and actions are sparsely distributed by the end of training
Shortcomings
- The softmax over network outputs provides a measure of the agent’s confidence in each action
- Instead what the agent is estimating is a measure of how optimal the agent thinks the action is, not how certain it is about that optimality
Implementation
#Add this to network to compute Boltzmann probabilities.
Temp = tf.placeholder(shape=None,dtype=tf.float32)
Q_dist = slim.softmax(Q_out/Temp)
#Use this for action selection.
t = 0.5
Q_probs = sess.run(Q_dist,feed_dict={inputs:[state],Temp:t})
action_value = np.random.choice(Q_probs[0],p=Q_probs[0])
action = np.argmax(Q_probs[0] == action_value)
Bayesian Approaches (w/Dropout)
Explanation
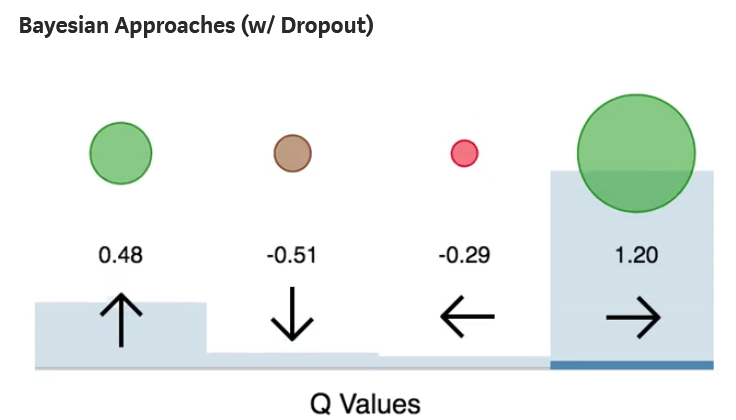
- What if an agent exploit its own uncertainty about its actions?
- This is exactly the ability that a class of neural network models referred to as Bayesian Neural Network provide
- BNNs act probabilistically
- This means that instead of having a single set of fixed weights, a BNNs maintains a probability distribution over possible weights
- In a RL, the distribution over weight values allows us to obtain distributions over actions as well
- The variance of this distribution provides us an estimate of the agent’s uncertainty about each action
Shortcomings
- In order to get true uncertainty estimates, multiple samples are required
- In order to reduce the noise in the estimate, the dropout keep probability is simply annealed over time from 0.1 to 1.0
Implementation
#Add to network
keep_per = tf.placeholder(shape=None,dtype=tf.float32)
hidden = slim.dropout(hidden,keep_per)
keep = 0.5
Q_values = sess.run(Q_out,feed_dict={inputs:[state],keep_per:keep})
action = #Insert your favorite action-selection strategy with the sampled Q-values.
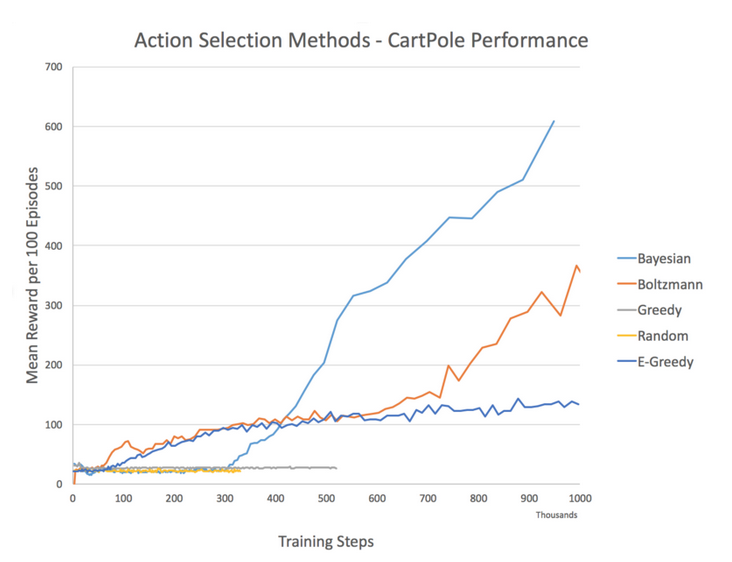
Comparison and Full Code
1.import modules
from __future__ import division
import gym
import numpy as np
import random
import tensorflow as tf
import matplotlib.pyplot as plt
%matplotlib inline
import tensorflow.contrib.slim as slim
- TF-Slim is a lightweight library for defining,training and evaluating complex models in Tensorflow
- Components of tf-slim can be freely mixed with native tensorflow, as well as other frameworks, such as tf.contrib.learn
Tensorflow-Slim Usage
import tensorflow.contrib.slim as slim
Variables
weights = slim.variable('weights',
shape=[10, 10, 3 , 3],
initializer=tf.truncated_normal_initializer(stddev=0.1),
regularizer=slim.l2_regularizer(0.05),
device='/CPU:0')
Layers
input = ...
net = slim.conv2d(input, 128, [3, 3], scope='conv1_1')
| Layer | TF-Slim |
|---|---|
| BiasAdd | slim.bias_add |
| BatchNorm | slim.batch_norm |
| Conv2d | slim.conv2d |
| Conv2dInPlane | slim.conv2d_in_plane |
| Conv2dTranspose (Deconv) | slim.conv2d_transpose |
| FullyConnected | slim.fully_connected |
| AvgPool2D | slim.avg_pool2d |
| Dropout | slim.dropout |
| Flatten | slim.flatten |
| MaxPool2D | slim.max_pool2d |
| OneHotEncoding | slim.one_hot_encoding |
| SeparableConv2 | slim.separable_conv2d |
| UnitNorm | slim.unit_norm |
def vgg16(inputs):
with slim.arg_scope([slim.conv2d, slim.fully_connected],
activation_fn=tf.nn.relu,
weights_initializer=tf.truncated_normal_initializer(0.0, 0.01),
weights_regularizer=slim.l2_regularizer(0.0005)):
net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1')
net = slim.max_pool2d(net, [2, 2], scope='pool1')
net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2')
net = slim.max_pool2d(net, [2, 2], scope='pool2')
net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3')
net = slim.max_pool2d(net, [2, 2], scope='pool3')
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4')
net = slim.max_pool2d(net, [2, 2], scope='pool4')
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5')
net = slim.max_pool2d(net, [2, 2], scope='pool5')
net = slim.fully_connected(net, 4096, scope='fc6')
net = slim.dropout(net, 0.5, scope='dropout6')
net = slim.fully_connected(net, 4096, scope='fc7')
net = slim.dropout(net, 0.5, scope='dropout7')
net = slim.fully_connected(net, 1000, activation_fn=None, scope='fc8')
return net
Losses
import tensorflow as tf
import tensorflow.contrib.slim.nets as nets
vgg = nets.vgg
# Load the images and labels.
images, labels = ...
# Create the model.
predictions, _ = vgg.vgg_16(images)
# Define the loss functions and get the total loss.
loss = slim.losses.softmax_cross_entropy(predictions, labels)
2. Load the environment
env = gym.make('CartPole-v0')
3. Deep Q-network
class Q_Network():
def __init__(self):
#These lines establish the feed-forward part of the network used to choose actions
# CartPole has 4 states -> [None,4] input
# self.Temp is boltzmann parameter
# self.keep_per is bayesian parameter
self.inputs = tf.placeholder(shape=[None,4],dtype=tf.float32)
self.Temp = tf.placeholder(shape=None,dtype=tf.float32)
self.keep_per = tf.placeholder(shape=None,dtype=tf.float32)
hidden = slim.fully_connected(self.inputs,64,activation_fn=tf.nn.tanh,biases_initializer=None)
hidden = slim.dropout(hidden,self.keep_per)
self.Q_out = slim.fully_connected(hidden,2,activation_fn=None,biases_initializer=None)
self.predict = tf.argmax(self.Q_out,1)
self.Q_dist = tf.nn.softmax(self.Q_out/self.Temp)
#Below we obtain the loss by taking the sum of squares difference between the target and prediction Q values.
self.actions = tf.placeholder(shape=[None],dtype=tf.int32)
self.actions_onehot = tf.one_hot(self.actions,2,dtype=tf.float32)
self.Q = tf.reduce_sum(tf.multiply(self.Q_out, self.actions_onehot), reduction_indices=1)
self.nextQ = tf.placeholder(shape=[None],dtype=tf.float32)
loss = tf.reduce_sum(tf.square(self.nextQ - self.Q))
trainer = tf.train.GradientDescentOptimizer(learning_rate=0.0005)
self.updateModel = trainer.minimize(loss)
-From above
# CartPole has 4 states -> [None,4] input
# self.Temp is boltzmann parameter
# self.keep_per is bayesian parameter
self.inputs = tf.placeholder(shape=[None,4],dtype=tf.float32)
self.Temp = tf.placeholder(shape=None,dtype=tf.float32)
self.keep_per = tf.placeholder(shape=None,dtype=tf.float32)
tf.reset_default_graph()
# non-statinary network
q_net = Q_Network()
target_net = Q_Network()
init = tf.initialize_all_variables()
trainables = tf.trainable_variables()
targetOps = updateTargetGraph(trainables,tau)
myBuffer = experience_buffer()
#create lists to contain total rewards and steps per episode
jList = []
jMeans = []
rList = []
rMeans = []
with tf.Session() as sess:
sess.run(init)
updateTarget(targetOps,sess)
e = startE
stepDrop = (startE - endE)/anneling_steps
total_steps = 0
for i in range(num_episodes):
s = env.reset()
rAll = 0
d = False
j = 0
while j < 999:
j+=1
if exploration == "greedy":
#Choose an action with the maximum expected value.
a,allQ = sess.run([q_net.predict,q_net.Q_out],\
feed_dict={q_net.inputs:[s],q_net.keep_per:1.0})
a = a[0]
if exploration == "random":
#Choose an action randomly.
a = env.action_space.sample()
if exploration == "e-greedy":
#Choose an action by greedily (with e chance of random action) from the Q-network
if np.random.rand(1) < e or total_steps < pre_train_steps:
a = env.action_space.sample()
else:
a,allQ = sess.run([q_net.predict,q_net.Q_out],feed_dict={q_net.inputs:[s],q_net.keep_per:1.0})
a = a[0]
if exploration == "boltzmann":
#Choose an action probabilistically, with weights relative to the Q-values.
Q_d,allQ = sess.run([q_net.Q_dist,q_net.Q_out],feed_dict={q_net.inputs:[s],q_net.Temp:e,q_net.keep_per:1.0})
a = np.random.choice(Q_d[0],p=Q_d[0])
a = np.argmax(Q_d[0] == a)
if exploration == "bayesian":
#Choose an action using a sample from a dropout approximation of a bayesian q-network.
a,allQ = sess.run([q_net.predict,q_net.Q_out],feed_dict={q_net.inputs:[s],q_net.keep_per:(1-e)+0.1})
a = a[0]
...
- Greedy policy
if exploration == "greedy":
#Choose an action with the maximum expected value.
a,allQ = sess.run([q_net.predict,q_net.Q_out],\
feed_dict={q_net.inputs:[s],q_net.keep_per:1.0})
a = a[0]
# a is greedy value from self.predict, self.predict choose the argmax action values
...
class Q_Network():
...
# self.Q_out is Network output from fully connected layer
self.Q_out = slim.fully_connected(hidden,2,activation_fn=None,biases_initializer=None)
# self.predcit is argmax from self.Q_out
self.predict = tf.argmax(self.Q_out,1)
...
q_net = Q_Network()
print(q_net.Q_out,q_net.predict)
>> Tensor("fully_connected_1/MatMul:0", shape=(?, 2), dtype=float32) Tensor("ArgMax:0", shape=(?,), dtype=int64)
- e-Greedy policy
if exploration == "e-greedy":
#Choose an action by greedily (with e chance of random action) from the Q-network
if np.random.rand(1) < e or total_steps < pre_train_steps:
a = env.action_space.sample() # random action
else: # greedy policy
a,allQ = sess.run([q_net.predict,q_net.Q_out],\
feed_dict={q_net.inputs:[s],q_net.keep_per:1.0})
a = a[0]
- boltzmann policy
startE = 1 #Starting chance of random action
e = startE
# weighted policy on each actions
if exploration == "boltzmann":
#Choose an action probabilistically, with weights relative to the Q-values.
Q_d,allQ = sess.run([q_net.Q_dist,q_net.Q_out]\
,feed_dict={q_net.inputs:[s],q_net.Temp:e,q_net.keep_per:1.0})
a = np.random.choice(Q_d[0],p=Q_d[0])
a = np.argmax(Q_d[0] == a)
# e is temp parameter
# self.Q_dist is softmax output
class Q_Network():
self.Q_out = slim.fully_connected(hidden,2,activation_fn=None,biases_initializer=None)
self.Q_dist = tf.nn.softmax(self.Q_out/self.Temp)
- bayesian policy
startE = 1 #Starting chance of random action
endE = 0.1 #Final chance of random action
anneling_steps = 200000 #How many steps of training to reduce startE to endE.
pre_train_steps = 50000 #Number of steps used before training updates begin.
stepDrop = (startE - endE)/anneling_steps
...
if exploration == "bayesian":
#Choose an action using a sample from a dropout approximation of a bayesian q-network.
a,allQ = sess.run([q_net.predict,q_net.Q_out]\
,feed_dict={q_net.inputs:[s],q_net.keep_per:(1-e)+0.1})
a = a[0]
...
if e > endE and total_steps > pre_train_steps:
e -= stepDrop
...
class Q_Network:
self.Q_out = slim.fully_connected(hidden,2,activation_fn=None,biases_initializer=None)
self.predict = tf.argmax(self.Q_out,1)
Reference sites
Simple Reinforcement Learning with Tensorflow Part 7: Action-Selection Strategies for Exploration
Deep Reinforcement Learning Agents
This repository contains a collection of reinforcement learning algorithms written in Tensorflow. The ipython notebook here were written to go along with a still-underway tutorial series I have been publishing on Medium. If you are new to reinforcement learning, I recommend reading the accompanying post for each algorithm.
The repository currently contains the following algorithms:
- Q-Table - An implementation of Q-learning using tables to solve a stochastic environment problem.
- Q-Network - A neural network implementation of Q-Learning to solve the same environment as in Q-Table.
- Simple-Policy - An implementation of policy gradient method for stateless environments such as n-armed bandit problems.
- Contextual-Policy - An implementation of policy gradient method for stateful environments such as contextual bandit problems.
- Policy-Network - An implementation of a neural network policy-gradient agent that solves full RL problems with states and delayed rewards, and two opposite actions (ie. CartPole or Pong).
- Vanilla-Policy - An implementation of a neural network vanilla-policy-gradient agent that solves full RL problems with states, delayed rewards, and an arbitrary number of actions.
- Model-Network - An addition to the Policy-Network algorithm which includes a separate network which models the environment dynamics.
- Double-Dueling-DQN - An implementation of a Deep-Q Network with the Double DQN and Dueling DQN additions to improve stability and performance.
- Deep-Recurrent-Q-Network - An implementation of a Deep Recurrent Q-Network which can solve reinforcement learning problems involving partial observability.
- Q-Exploration - An implementation of DQN containing multiple action-selection strategies for exploration. Strategies include: greedy, random, e-greedy, Boltzmann, and Bayesian Dropout.
- A3C-Doom - An implementation of Asynchronous Advantage Actor-Critic (A3C) algorithm. It utilizes multiple agents to collectively improve a policy. This implementation